
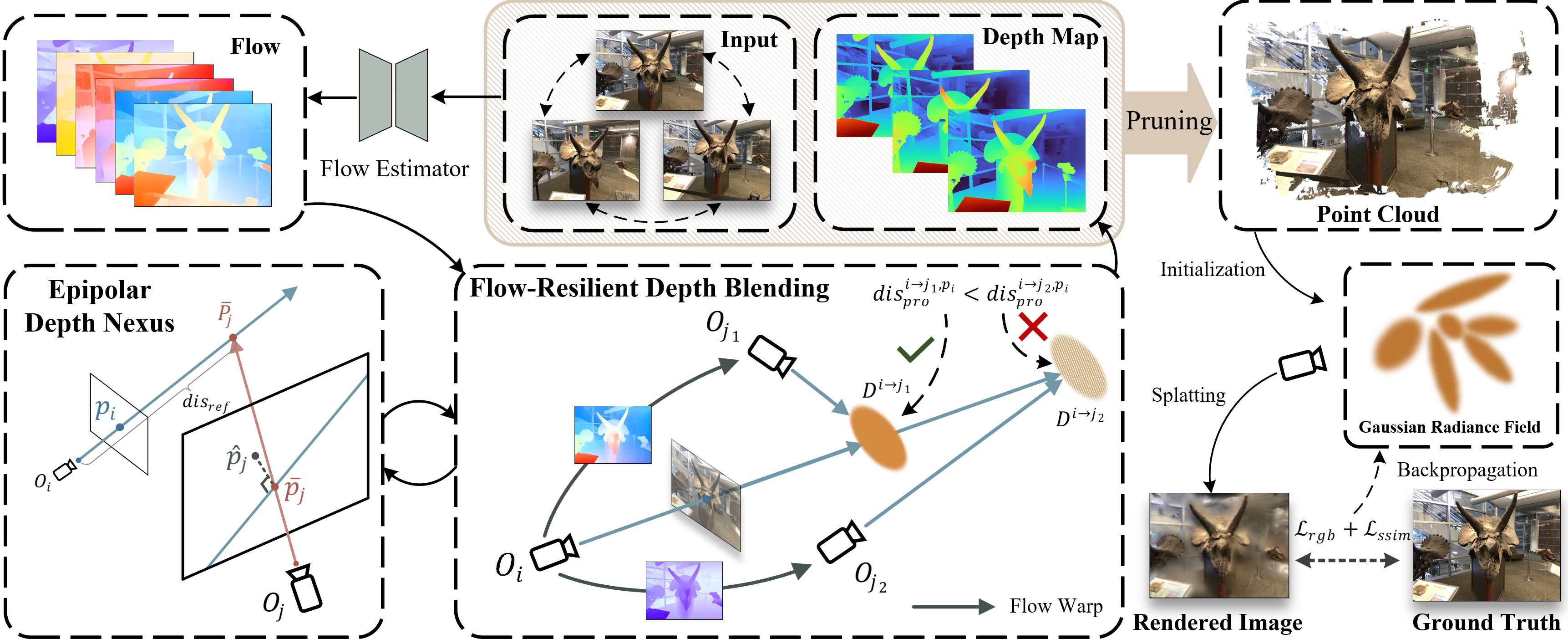
NexusGS: Sparse View Synthesis with Epipolar Depth Priors in 3D Gaussian Splatting
Yulong Zheng1
Zicheng Jiang1
Shengfeng He2
Yandu Sun1
Junyu Dong1
Huaidong Zhang3
Yong Du1, *
1Ocean University of Chinay
2Singapore Management University
3South China University of Technology
*corresponding author
Paper | Project Page | Video
Environmental Setups
Tested on Ubuntu 18.04, CUDA 11.8, PyTorch 2.0.0
conda env create -n nexus python=3.10
conda activate nexus
Install Pytorch
pip install torch==2.0.0 torchvision==0.15.1 torchaudio==2.0.1 --index-url https://download.pytorch.org/whl/cu118
Install submodules
pip install submodules/diff-gaussian-rasterization-confidence
pip install submodules/simple-knn
Running
Taking LLFF as an example, the dataset folder structure is as follows:
├── datasets
├── LLFF
├── scene
├── sparse
├── images
├── images_8
├── 3_views
├── flow
LLFF
Download LLFF dataset: Link.
Download the LLFF optical flow processed by FlowFormer++ from the Link.
Run using the following script:
sh scripts/run_llff.sh 0
DTU
TODO
MipNeRF-360
TODO
Citation
If you find our work useful for your project, please consider citing the following paper.
@article{zheng2025nexusgs,
title={NexusGS: Sparse View Synthesis with Epipolar Depth Priors in 3D Gaussian Splatting},
author={Zheng, Yulong and Jiang, Zicheng and He, Shengfeng and Sun, Yandu and Dong, Junyu and Zhang, Huaidong and Du, Yong},
journal={arXiv preprint arXiv:2503.18794},
year={2025}
}
Acknowledgement
Special thanks to the following awesome projects!
Inference Providers
NEW
This model isn't deployed by any Inference Provider.
🙋
Ask for provider support